
Digitizing
In ProAnalyst, pairs of cameras are calibrated by locating the calibration fixture points in both camera views. ProAnalyst applies a direct linear transformation algorithm to triangulate the locations of the points in three-dimensional space, based on the known distances of the points relative to one another (provided by Xcitex). This procedure determines the relative position, orientation and internal parameters of each camera pair. It also provides a measure of the residual error associated with the linear transformation. Prior to digitizing the calibration frame image the lens correction filters calculated from the checkerboard images taken with each camera are applied to the calibration fixture videos as well as all other video sequences for that day. After pairwise calibration of camera pairs, all six possible calibrations are merged so that a single set of x, y, and z coordinates can be generated. This can be done either by averaging the x, y, and z coordinates between all calibrations, or by calculating a weighted average based on the residuals errors present in each calibration.
Within the calibration tab of ProAnalyst, the calibrated space is zeroed to an origin at the corners of one of the force plates. For trials where kinematic and kinetic data are combined, the Xcitex internal coordinate system is also rotated such that it conforms to the coordinate system of the force plates. The resultant orientation is the one shown in the right panel of the figure: x = side-to-side, y = fore-aft, and z = vertical.
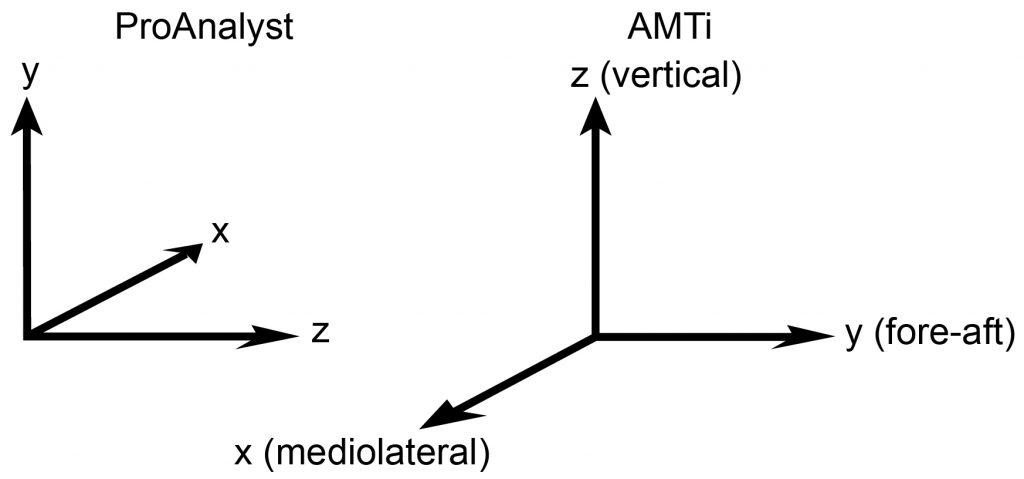
Xcitex internal coordinate system, AMTI coordinate system
AVIs of events for digitizing are imported into Proanalyst, cropped to the duration of interest, and saved under a new file name with the lens correction filter applied to each video image during the saving process. Contrast and brightness enhancing filters may also be applied. Marker points are then digitized in each video. The auto-digitize option for almost all markers will not capture a marker throughout an entire sequence, due cameras losing sight of markers, a swinging limb covering up markers, or markers changing shape as they are seen by the stationary cameras. Auto-digitizing is therefore supplemented by manual digitizing, and short gaps in marker visibility are filled in by extrapolation. The goal is to capture the markers in most camera views, but a minimum of two views is required for calculating 3D coordinate data.
NOTE: Because all cameras are at an angle to the animal subject’s plane of movement, video data are not suitable for accurate and precise 2D quantitative kinematic analysis.